



Le site EMSO-LO est un site instrumenté labellisé dédié à l’observation à long terme des grands fonds marins. EMSO-LO possède de nombreuses spécificités qui en font un site unique, dans les grands fonds marins, approprié au suivi de changements environnementaux et océanographiques à long terme. Il est situé en Méditerranée, dans le bassin ligure, qui est considéré comme un océan miniature, et une zone d’intérêt pour les caractéristiques de ses masses d’eau et le fonctionnement physique et biogéochimique. Ce site fait partie d’une “regional facility” (EMSO-Ligure) de l’infrastructure européenne ERIC-EMSO depuis 2016.
L’instrumentation pluridisciplinaire déployée sur ces plateformes pérennes a, en effet, permis l’acquisition de données environnementales, et biogéochimiques à long terme (> 10 ans pour la pression, température, oxygène, courantologie). Le site se compose de 3 plateformes pérennes (un module d’Interface Instrumenté MII, une boîte de jonction scientifique BJS et une ligne de mouillage instrumentée autonome, ALBATROSS), dédiées à recevoir des instruments océanographiques.
En février 2022, un ensemble d’instruments innovants ont été déployés sur le site, puis connecté à la plateforme BJS permettant l’acquisition de données environnementales et biologiques uniques à ces profondeurs. Malheureusement, en janvier 2024, une panne d’alimentation électrique sur un nœud de l’observatoire du LSPM (Laboratoire Sous-marin Provence Méditerranée) a mis fin soudainement aux acquisitions de données.
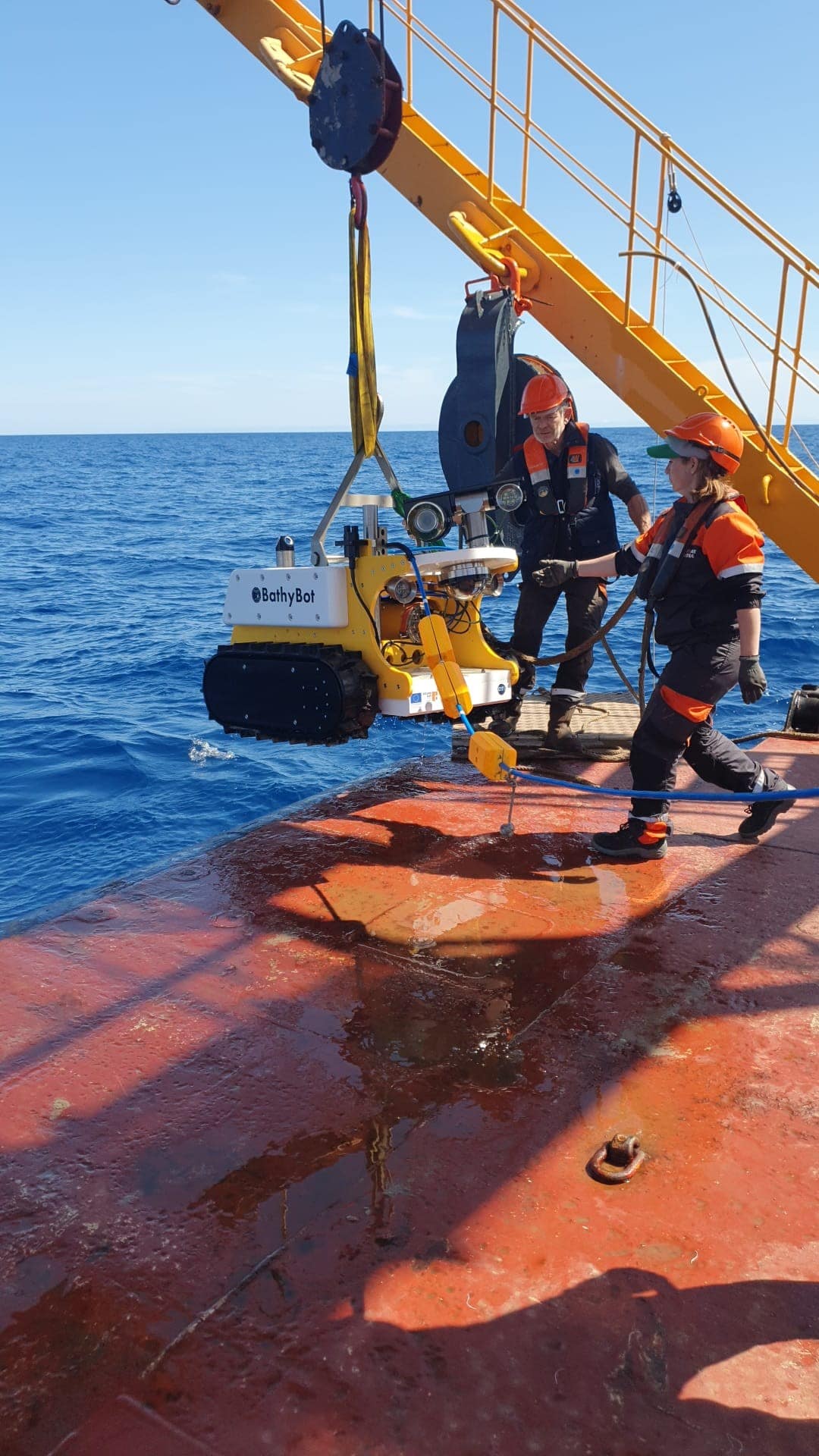
Au mois de mai 2025, nous avons pu effectuer avec succès la récupération de la BJS, de BathyBot (robot téléopéré) et de son BathyDock.
Cette opération s’est effectuée dans le cadre de la collaboration avec Km3NeT et le LSPM à partir du navire de FOSELEV Marine le Castor 02, du navire de recherche de SAS (Ship As a Service) le Janus II et de son ROV Apache. Cette opération a été financée par le CNRS-Ifremer, via l’IR EMSO-Fr. La Division Technique du CNRS-INSU (DT INSU) a apporté son support indispensable dans cette opération et l’intervention des plongeurs de l’OSU Pytheas et du MIO a permis de sécuriser la récupération de BathyBot. Les objets sont actuellement en expertise, maintenance et éventuelles réparations pour un redéploiement en 2026.
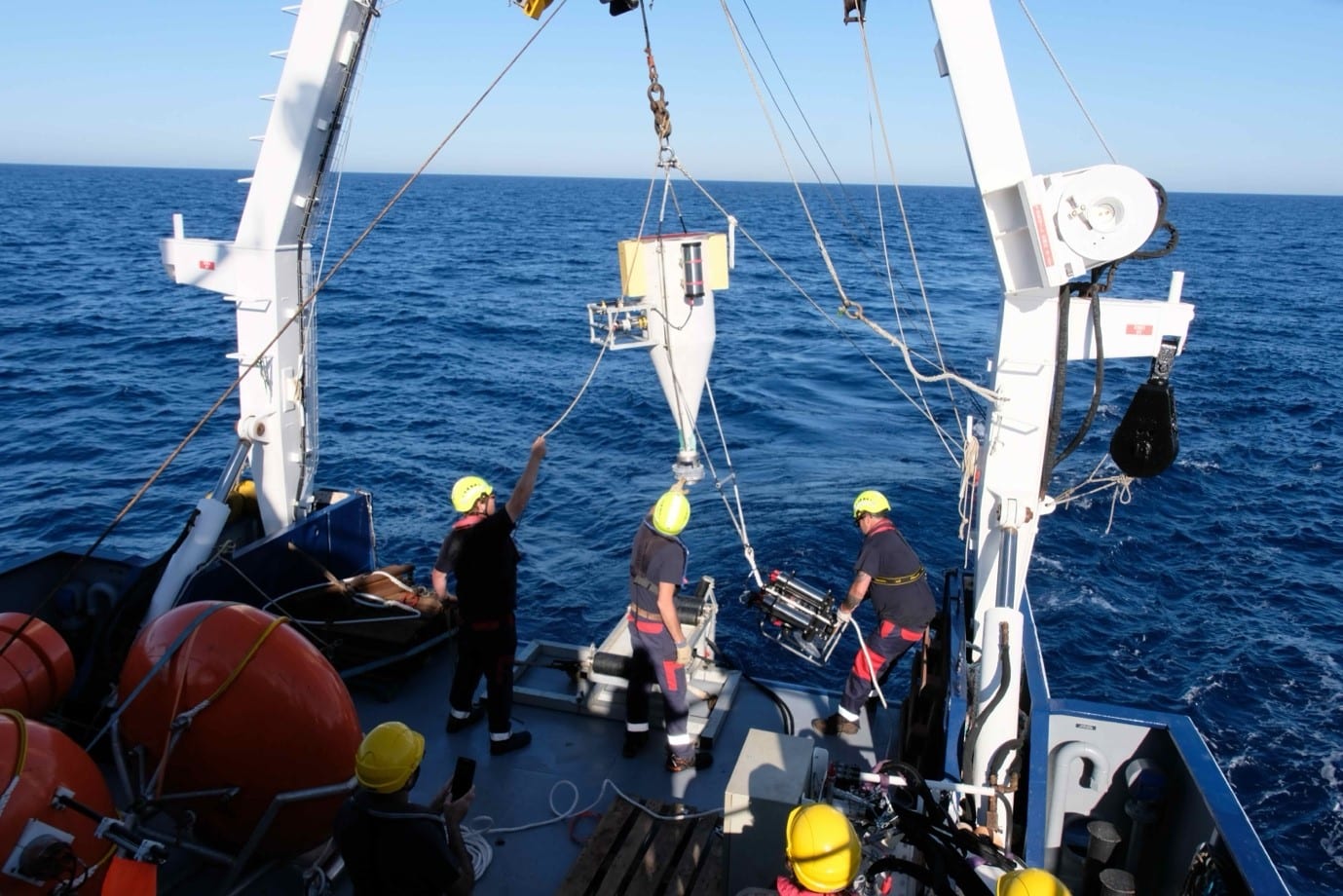
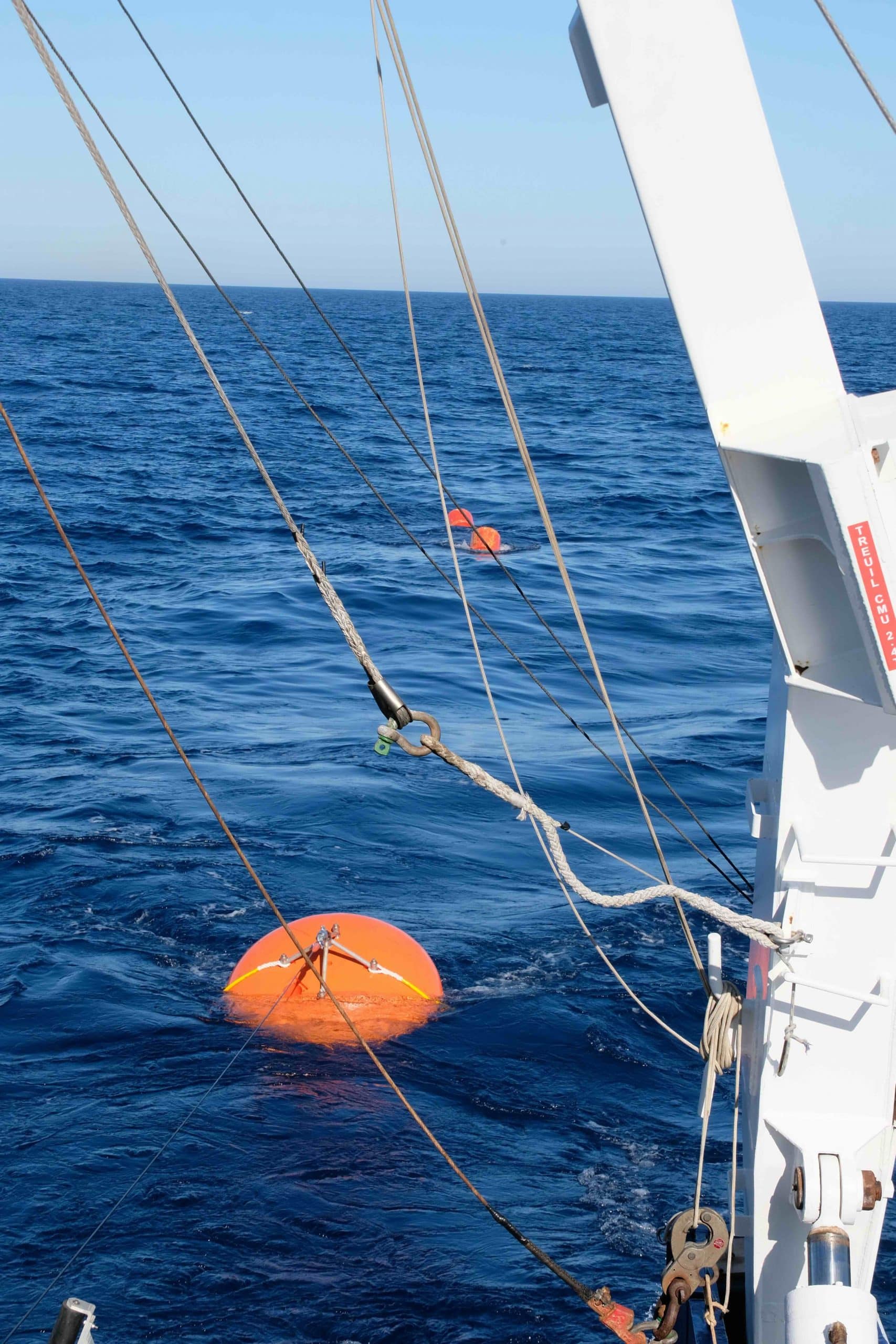
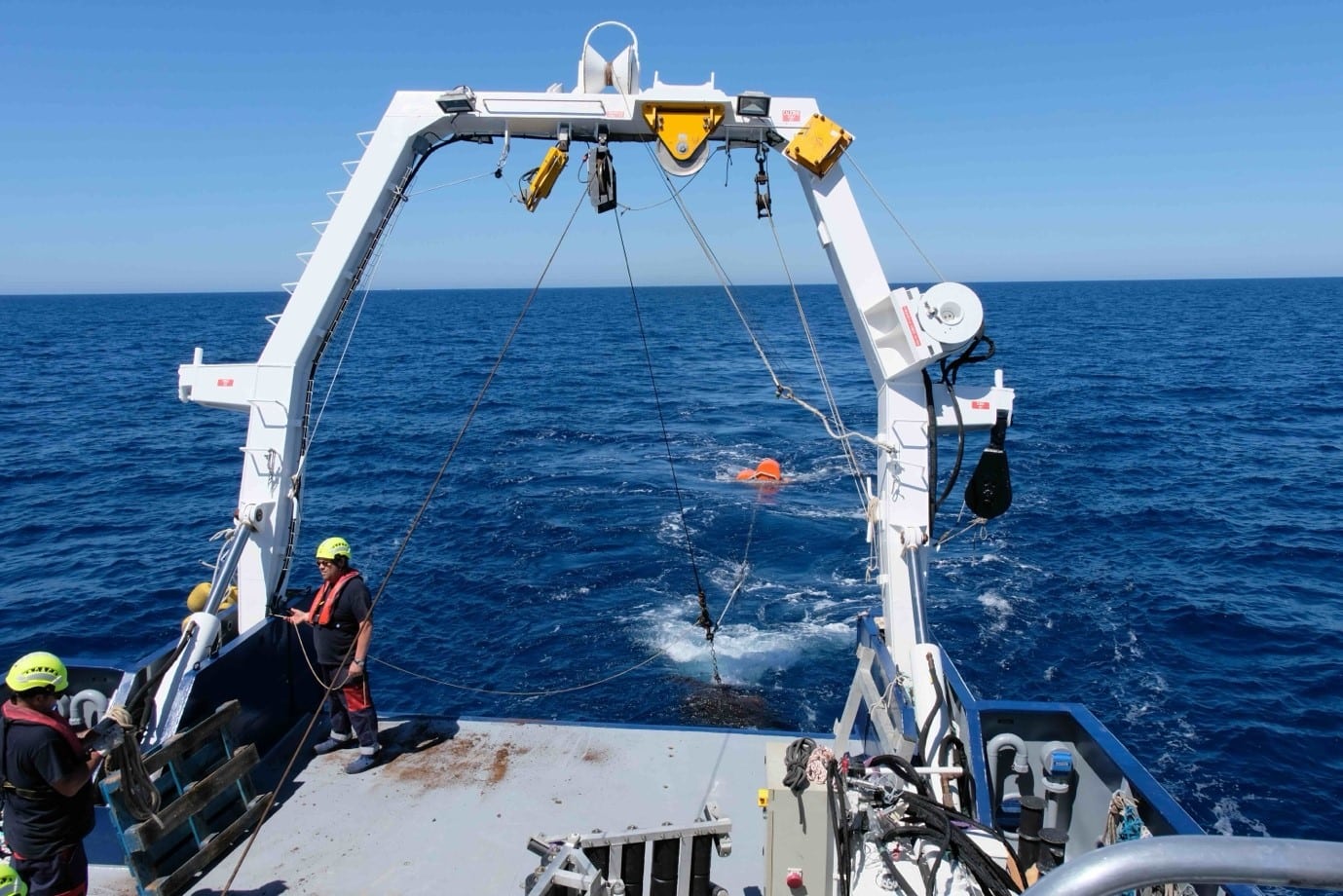
En cette fin de mois de mai, la ligne ALBATROSS récupérée en avril dernier, a été redéployée avec succès à partir du NO Tethys II (FOF). Il est à noter que la ligne ALBATROSS a été dotée de nouveaux équipements en plus de ses 8 microcat (p, T, S, O2) et ses 6 Aquadopp (Courant) dédiés à l’observation des propriétés thermodynamique de la Méditerranée nord-occidentale, de l’évolution de la stratification de la colonne d’eau et de la ventilation des eaux d’origine levantine et profondes. En effet, la ligne a été dotée à 500m, d’un capteur pH, d’un IODA, pour la mesure de la dynamique de l’oxygène et d’un Visu-trap (Collaboration avec le LOG et l’IMEV) pour la mesure du flux de particules et l’acquisition d’images des organismes planctoniques macroscopiques.
La ligne de mouillage est constituée de 3 étages qui peuvent être récupéré séquentiellement. La récupération du premier étage, constituée du IODA et du Visu-trap est prévue dans un an et les 2 autres étages seront récupérés dans 18-24 mois.
Merci à la DT INSU pour ce succès et au SAM pour leur support.
Les données sont disponibles en ligne.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}